Télémétrie de vol d'un drone
Il y a quelques années, j’ai acheté un petit drone pas cher : Tello. On peut le piloter avec son smartphone au travers d’une communication UDP sur du WiFi. J’ai décidé de le “hacker” et de regarder les données de télémétrie de vol qu’il émet.
Prenant mon courage à deux bras, j’ai développé une petite librairie NodeJS pour pouvoir le piloter depuis un bout de code, récupérer les données de vol en temps réel et stream la vidéo de la caméra. Après plusieurs heure et litres de café, j’y suis parvenu, vous la trouverez là. J’ai des enfants et le but principal était de les faire développer en Javascript en s’amusant. En fait, mes enfant n’y ont prêté aucun intérêt et le seul enfant qui joue avec, c’est moi.
Si vous possédez ce drone, vous pouvez bien sûr utiliser cette lib. Ce petit drone communique en UDP. Il expose un serveur pour recevoir des commandes et a un client pour transmettre ses données de vol à un serveur UDP tiers.
Les données de télémétrie disponibles sont :
Name
Unit
Description
h
cm
altitude
baro
cm
baromètre
tof
cm
distance au sol
templ
°C
temperature mini de la batterie
temph
°C
temperature maxi de la batterie
pitch
°
tangage
roll
°
roulis
yaw
°
lacet
agx
0.001g
accéleration x
agy
0.001g
accéleration y
agz
0.001g
accelération z
vgx
cm/s
vitesse x
vgy
cm/s
vitesse y
vgz
cm/s
vitesse z
bat
%
batterie
données de télémétrie de vol

https://fr.wikipedia.org/wiki/Pilotage_d%27un_avion
Warp 10
Warp 10 est une plateforme formidable, à la fois une base de données de séries temporelles (TSDB), un moteur d’analyse avec son langage de script (on verra plus tard) mais surtout une plateforme avec plein de plugins dont un permettant d’instancier un serveur UDP.
Plugin UDP
Je pars du postulat que vous avez installé Warp 10 dans /opt/warp10 (pas dans une image docker hein ;o) ), on va activer le plugin UDP. Dans /opt/warp10/etc/conf.d/80-udp-plugin.conf :
1 | // activate the UDP plugin |
Il serait bien d’activer l’extension Debug :
1 | warpscript.extension.debug = io.warp10.script.ext.debug.DebugWarpScriptExtension |
Ensuite, il faut créer un répertoire /opt/warp10/udp et y placer un fichier tello.mc2 :
1 | 'Loading Tello telemetry' LOGMSG |
Script de pilotage
Ensuite vous pouvez redémarer Warp 10. Connectez le drone via le WiFi et utilisez ce petit javascript pour le piloter :
1 | import {Tello} from "@giwisoft/ryze-tello-sdk"; |
Vous pouvez également streamer la vidéo via mplayer :
1 | await tello.startStream(); |
Balancer la télémétrie en direct sur Warp 10 :
1 | await tello.startTelemetry({ |
Balancer la télémétrie en direct sur du MQTT
1 | await tello.startTelemetry({ |
Voici un petit serveur MQTT en JavaScript pour tester :
1 | const aedes = require('aedes')(); |
Et un client pour afficher les traces :
1 | const mqtt = require('mqtt'); |
Mais bon, le plus fun c’est quand même d’utiliser la com UDP directement avec Warp 10.
Normalement, dès que le drone démarre ses moteurs, les données sont transmises à Warp 10 et en faisant tail -f /opt/warp10/logs/warp10.log, vous devriez voir :
1 | [1616403713307] pitch:0;roll:0;yaw:-156;vgx:0;vgy:0;vgz:0;templ:79;temph:81;tof:10;h:0;bat:82;baro:-99.61;time:31;agx:1.00;agy:-10.00;agz:-998.00;[1616403713409] pitch:0;roll:0;yaw:-156;vgx:0;vgy:0;vgz:0;templ:79;temph:81;tof:10;h:0;bat:82;baro:-99.83;time:31;agx:1.00;agy:-10.00;agz:-1002.00;[1616403713511] pitch:0;roll:0;yaw:-156;vgx:0;vgy:0;vgz:0;templ:79;temph:81;tof:10;h:0;bat:82;baro:-99.87;time:31;agx:1.00;agy:-11.00;agz:-1003.00; |
Première analyse de la télémétrie
Et pour visualiser les données, allez sur WarpStudio et affichons la distance au sol (par exemple) :
1 | [ 2021 03 22 10 18 ] TSELEMENTS-> 'start' STORE |
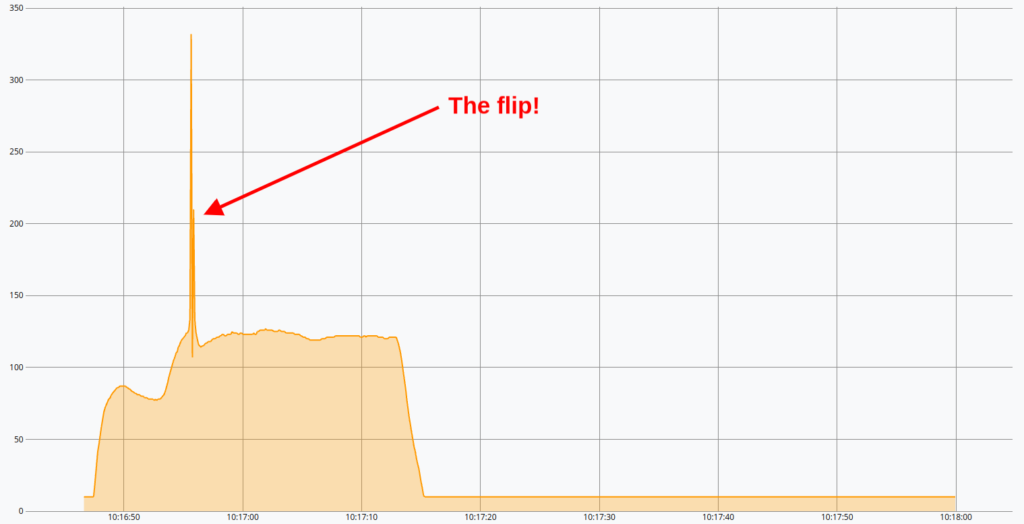
Le flip
Et hop, je vous laisse vous amuser à explorer les données.
Aller plus haut, aller plus hauuuuuauuut
Après avoir niqué votre journée en vous ayant collé une chanson dans la tête, je vous encourage à aller lire l’article original qui vous permettra de faire de la détection d’anomalie ainsi que réaliser un dashboard.
 Article original
Article original  github.com/Giwi/ryze-tello-sdk
github.com/Giwi/ryze-tello-sdk