Favicon avec thème clair/sombre
Voici une technique pour que le favicon de votre site s'adapte automatiquement au thème de votre navigateur.
Lire la suite
Favicon avec thème clair/sombre
Discovery Explorer + NginX reverse proxy + HTTP basic auth

Générer des Hash 128 bits sous Linux

Appelez un programme C depuis java avec JNA

Mon Linky dans Warp 10 avec un joli dashboard

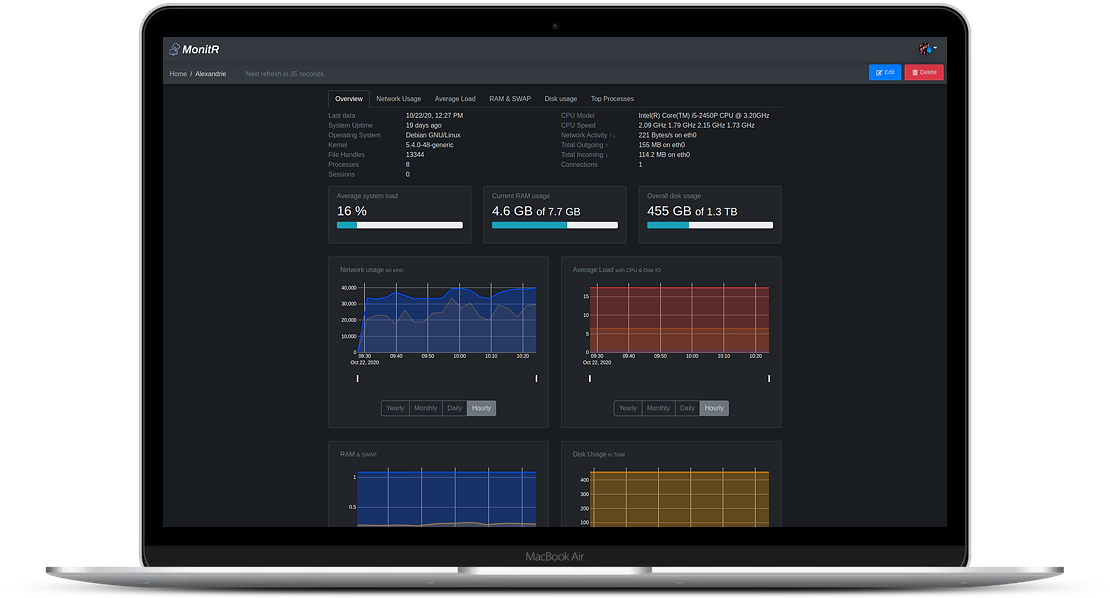
Monitorer son infra avec Warp 10 – partie 3
Monitoring de raspberry, la suite.
Maintenant que l’on a instrumenté et analysé son infra, il est temps d’afficher tout ça dans un dashboard.
Il y a plusieurs façon d’e faire de la dataviz avec Warp 10.


Comment copier un disque dur distant sur un disque dur local
Si comme moi, vous souhaitez migrer le disque dur de votre media player sur un nouveau disque, voici une ligne de commande bien pratique.
J’accède à mon media center en ssh, sur mon media center, mon vieux disque est en /dev/sda (fdisk -l pour vous en assurer).
Mon nouveau disque est branché en USB sur mon laptop en /dev/sdb (faites attention, je ne veux pas être tenu pour responsable d’une fausse manip!)
Monitorer son infra avec Warp 10 – partie 2
Suite de l’article précédent Monitorer son infra avec Warp 10 – partie 1.
Nous avons vu comment installer sensision et remonter des métriques dans Warp 10. Maintenant, explorons ces métriques.
Pour avoir la liste complète des métriques, vous pouvez requêter votre instance Warp 10 avec WarpStudio en y ajoutant les infos de connexion.
Tout sur le modèle Geo Time Series
Les Geo Time Series (GTS) sont le cœur de la plateforme Warp 10. Seules les GTS qui peuvent être stockées dans la base de données Warp 10 et ce sont des citoyens de première classe à la fois dans FLoWS et WarpScript. C’est pourquoi il y a tant de fonctions WarpLib pour leur manipulation et tant de billets de blog faisant mention de GTS!
Par conséquent, comprendre le modèle GTS est la première étape de la maîtrise de la plateforme Warp 10. Heureusement, ce modèle est assez simple, mais puissant, et cet article passera en revue la plupart de ses aspects.